電磁ブレーキ
概要
ステッピングモータの中には電磁ブレーキが取り付けられているものがあります。ステッピングモータは通常、停止時にも保持トルクがあり負荷を保持できますが、停電などで電源が落ちた場合には保持力がなくなり、負荷を吊り下げている場合には負荷が落下してしまいます。
電磁ブレーキはモータの軸をロックする装置で、通電しているときだけ軸が解放されますので、予期しない電源断が発生した場合にただちに軸がロックされ、負荷が動いたり落下したりするのを防ぎます。特に負荷を上下に移動させる場合には必要です。
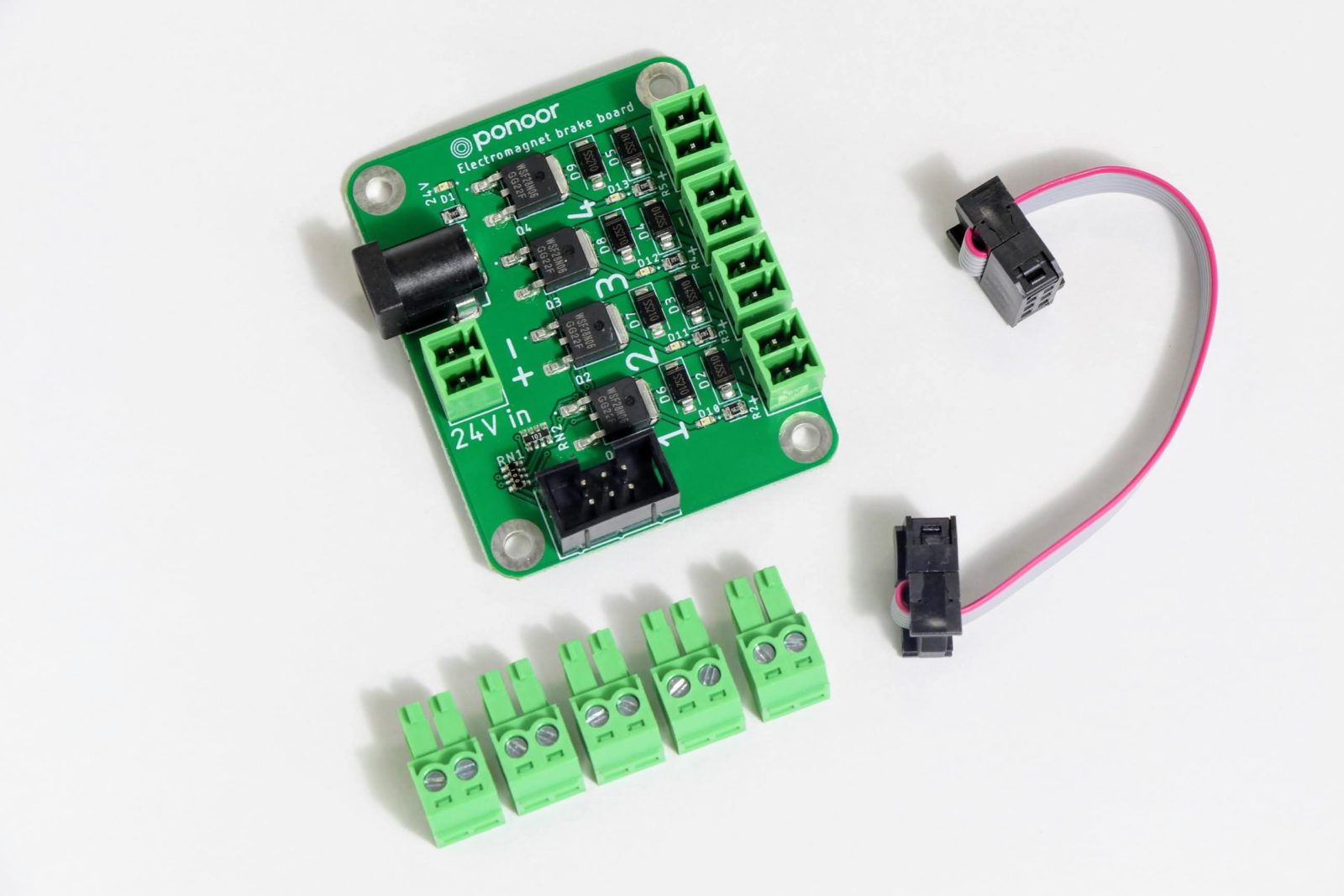
電磁ブレーキがついたステッピングモータを使用する場合には、モータの状態に応じで電磁ブレーキを開放/ロックする必要があります。この電磁ブレーキ用制御基板は、STEP400に連動して電磁ブレーキを制御するための基板です。
電磁ブレーキの動作
電磁ブレーキとは
ステッピングモータの中には電磁ブレーキが取り付けられているものがあります。ステッピングモータは通常、停止時にも保持トルクがあり負荷を保持できますが、停電などで電源が落ちた場合には保持力がなくなり、負荷を吊り下げている場合には負荷が落下してしまいます。
電磁ブレーキはモータの軸をロックする装置で、通電しているときだけ軸が解放されますので、予期しない電源断が発生した場合にただちに軸がロックされ、負荷が動いたり落下したりするのを防ぎます。特に負荷を上下に移動させる場合には必要です。
動作タイミング
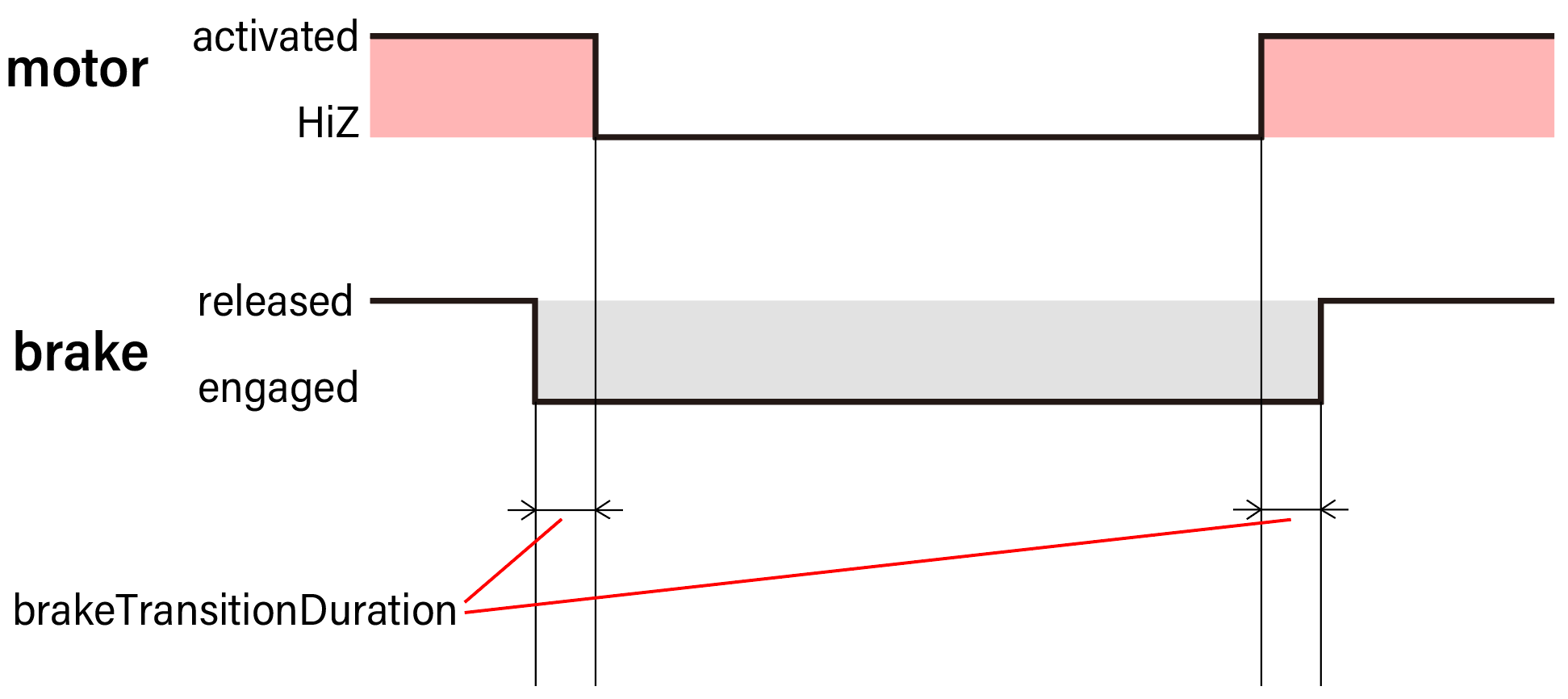
電磁ブレーキの電源を切ると軸がロックされますが、ブレーキ機構が物理的に動作する時間が必要ですので、その間に負荷が動かないようにモータの励磁を切るまでに、モータ、ブレーキ双方がオーバーラップして保持する時間 (brakeTransitionDuration) を置く必要があります。
このオーバーラップ時間はブレーキがかかるまでの時間には影響しませんが、ブレーキ操作の後、モータを動作・解放させるまでの待ち時間に影響します。STEP400ではこのオーバーラップ時間の初期値は100ms(0.1秒)になっていますが、/setBrakeTransitionDuration コマンドや Config Tool で変更できます。
電磁ブレーキのついたステッピングモータの例

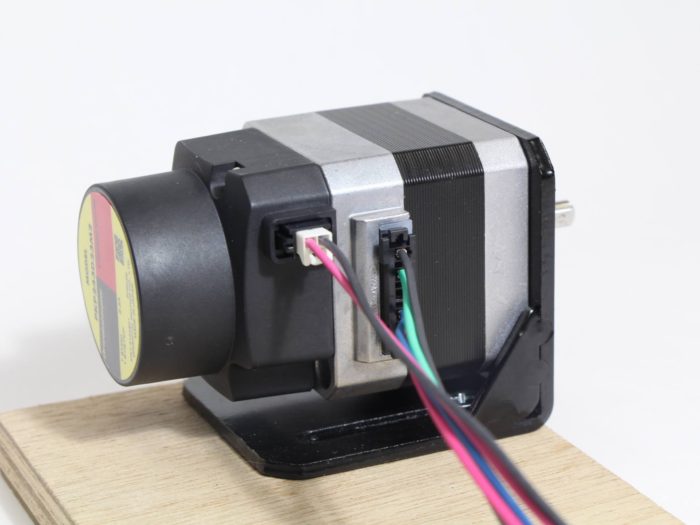
OrientalMotor PKP243D23M2
接続
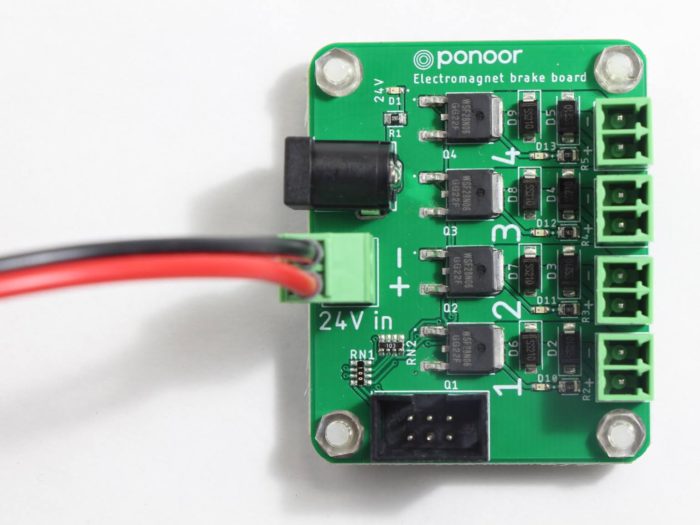
電源の接続
電源電圧
電磁ブレーキに印加する電圧を電磁ブレーキ基板に供給します。電磁ブレーキの多くは24Vですが、使用するモータのデータシートで確認してください。
電源端子
DCジャックとユーロブロックの2種類の電源端子があります。
警告
この2つの端子は基板上で並列接続されていますので、同時に給電することは危険ですので絶対に行わないでください。
DCジャック
外形5.5mm
内径2.1mm
センタープラス
ユーロブロック
3.81mmピッチ、2ピンのユーロブロックを使用します。基板上に表示してある極性通りに接続してください。
ブレーキとの接続
ブレーキ用端子へ電磁ブレーキへの線を接続します。モータとブレーキは、それぞれ同じ番号のコネクタへ接続してください。
電磁ブレーキの多くは極性がありますので、基板上に書かれた正負の記号をみて接続してください。
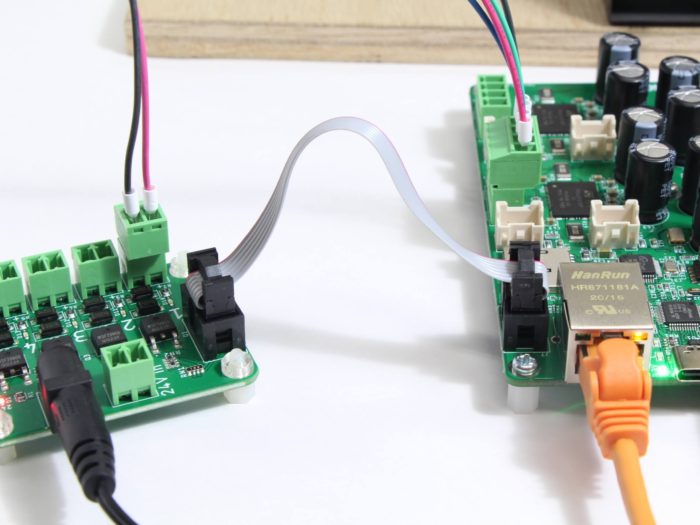
STEP400との接続
STEP400とは6ピンリボンケーブルで接続します。
コマンドの送り方
電磁ブレーキモード
電磁ブレーキを使用する場合は、まずSTEP400を電磁ブレーキモードにする必要があります。それには /enableElectromagnetBrake コマンドを送るか、あるいは Config Tool の Electromagnetic brake enable から設定できます。
このモードがオンになっていると、モータの励磁に合わせて電磁ブレーキが自動的に制御されます。
励磁と無励磁の切替
/activate コマンドによって、モータの励磁と無励磁を切り替えます。モータ励磁時にはブレーキ開放、モータ無励磁のときにはブレーキが保持状態になります。
ブレーキとモータの保持力が重なる Brake Transition Duration は /setBrakeTransitionDuration コマンドか、Config Toolの Brake transition duration 空設定できます
軸の解放
電磁ブレーキを開放したままモータを無励磁にすると負荷が落下しますが、メンテナンスなどの理由により軸を開放する必要があるときは /free コマンドを利用します。
警告
このコマンドは十分注意して送ってください。負荷が吊り下げられたままの状態では危険ですので、モータの保持力がなくなっても問題ない状態かどうかを確認してください!
各コマンドの挙動
電磁ブレーキが保持状態のときは、 /run, /goTo, /move などのモーションコマンドは実行されず、 ERROR_BRAKE_ENGAGED が発生します。
注釈
Pythonユーザの方へ:このメッセージはエラーを発生させます!
またモータを無励磁にする以下のコマンドは、次のような挙動になります。
/softHiZ: モータを減速停止し、停止したら電磁ブレーキを保持状態にしたのち、モータをHiZ状態にする。/hardHiZ: モータを瞬間停止し、電磁ブレーキを保持状態にしたのち、モータをHiZ状態にする。
/softStop と /hardStop は停止後もモータは励磁したままですので、電磁ブレーキモードでも通常時と同じ挙動です。
仕様
基本仕様
入力可能電源電圧 : 5 - 48V
制御可能チャンネル数 : 4ch
基板サイズ : 45 x 56mm
注釈
12V以下で動かす場合、インジケータのLEDが視認できない可能性があります。
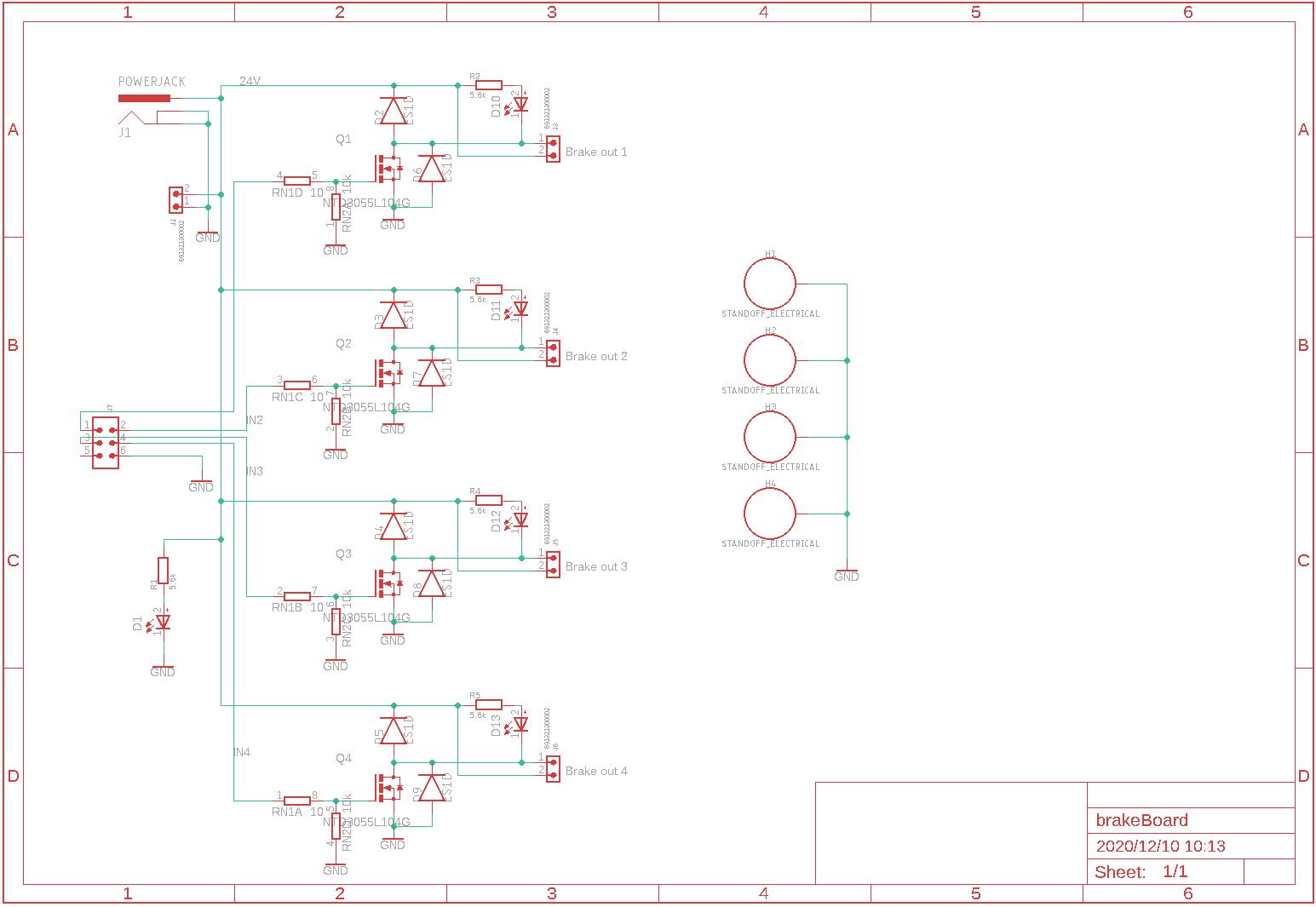
駆動可能電流
ON/OFFを切り替えているMOSFETの データシート 上の定格は60V28Aです。実際は電源ターミナルブロックの定格7Aに制限されますが、その範囲内でLEDやモータなど別の負荷を動かすことも可能です。
基板外形図
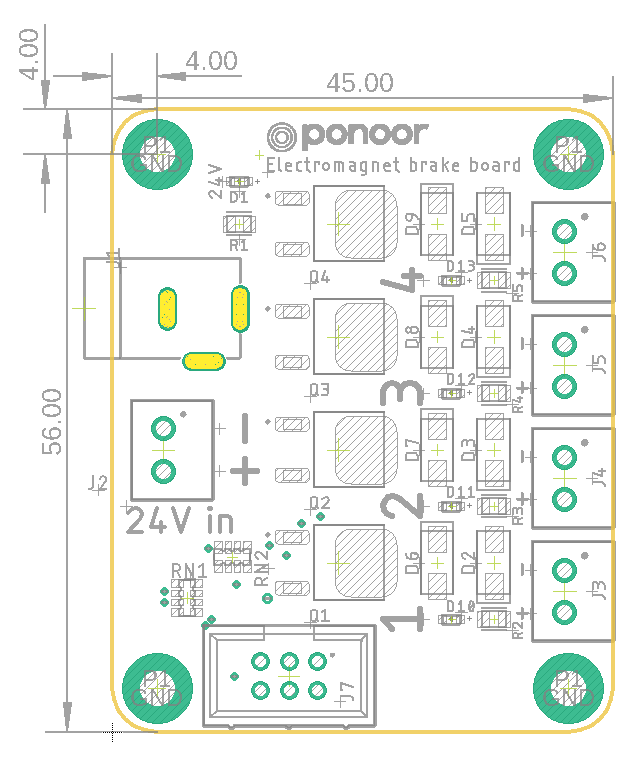
基板外形 PDF_
付属品
3.81mmピッチ 2ピンユーロスタイル ターミナルブロック x 5
6ピンリボンケーブル